
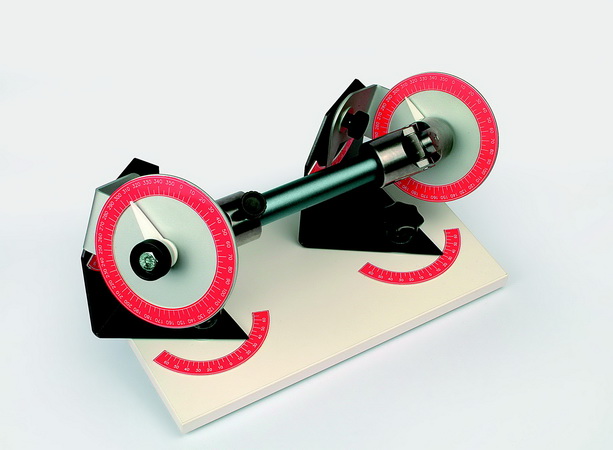
If universal joints are driven without bending of a part of the shaft, they run with a constant rotary movement. If a bent universal joint is used, an uneven movement results, there is advance or retard on the output side. This can be demonstrated very graphically on the model by the two scales of the drive and output side being read. If the drive and the output side are bent at the same angle, the advance and retard precisely compensate one another and the output side runs evenly again compared with the drive side. If one joint is offset against the other on the model, for example by 90 degrees, this again results in a strong unevenness. This also happens in practice when drive shafts are put back in the wrong position after repairs.
description
ordernumber 1312